

測繪無人機采用RTK差分定位系統(可實現厘米級定位),這樣也是為了加快作業效率。據介紹如果采用普通GPS定位,為了校正誤差還需要派人去實地布設若干個像控點,而用了RTK則可以基本不用、或是只需要少量像控點。
這篇文章告訴你測繪無人機上RTK到底有什么用?
第一:我們得明白什么是RTK?
RTK(Real -time kinemaTIc)定位技術就是基于載波相位觀測值的實時動態定位技術,它能夠實時地提供測站點在指定坐標系中的三維定位結果,并達到厘米級精度。
第二:RTK是干什么用的?
RTK(Real -TIme kinemaTIc)定位技術就是基于載波相位觀測值的實時動態定位技術,它能夠實時地提供測站點在指定坐標系中的三維定位結果,并達到厘米級精度。
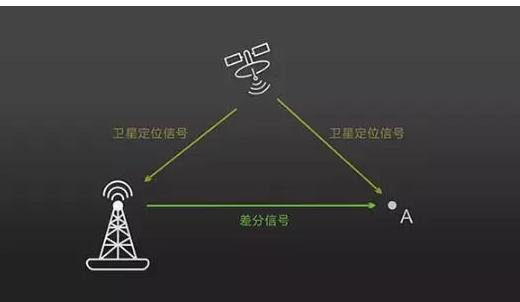
如上圖所示,基站與A點的距離比較近,因此他們接收衛星信號時受到的大氣層影響也基本接近,基站本身已知所處位置的坐標,在得到衛星信號提供的坐標之后與原數據做新差分,并將差分的結果告知A點,因此A點也可以得到高精度的結果。
第三:RTK對于無人機來說有什么用?
自從RTK帶入無人機領域以后,最近一段時間RTK技術在無人機上的應用有點火。在農業植保領域,大家都已經知道它能為無人機提高定位精度,降低飛行誤差。
由于衛星信號的多路徑效應以及大氣中對衛星信號的折射和反射,當農田周邊出現防風林或者天氣環境影響時,衛星的定位精度就會降低,導致作業中的無人機出現航線偏移。
航線偏移存在一定的風險,在便用普通GPS進行定位,航線偏移的誤差甚至可能達到10米左右,如果偏移量太大,將可能導致植保無人機撞上防風林或者其他事故發生。因此這樣的自主飛行并不能讓人安心,也沒有辦法真正的解放操作員的雙手,操作員仍需要全神貫注地盯著整個作業過程,隨時準備救場。
通過下圖我們先來了解一下GPS和RTK定位的其中一個特點:

普通GPS的圓概率誤差(CEP)有50%左右的概率在2.5米以內,另外50%的誤差可能更大,甚至接近10米。上圖中,當我們想要尋找O點的位置時,普通的GPS會告訴我們O點在A處,而A則是黃圈直徑10米范圍內的任意一個點。RTK通過實時差分技術,可以將范圍縮小到10cm內。
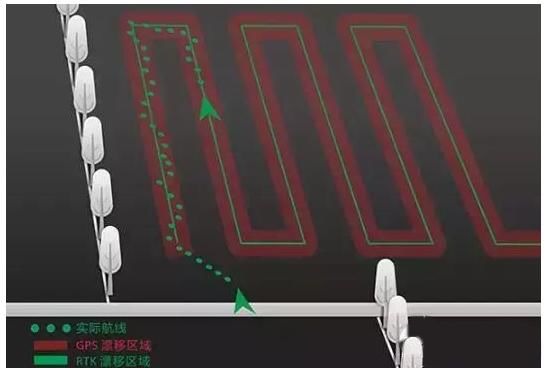
飛機在作業時獲取到的航線坐標并不是一條直線,而是一個有寬度的區域,如果使用GPS定位進行航線作業,則區域的寬度在0-10米的范圍內,此時飛機實際飛行的軌跡將會是一條歪歪扭扭的曲線,并且每一次飛行的曲線都不一致。
而使用RTK技術時,航線將是一個0-10厘米寬度的區域,與GPS相比,RTK基本等于是直線飛行,彎曲的幅度很小,因此效果將更均勻可控。
植保無人機:在一些壟間距較大的田間作業時,如發生的偏移較大,甚至可能產生作物本身大部分漏噴和土地污染等次生危害,總而言之,RTK通過大幅提高定位精度來拓寬GPS定位技術的應用場景。在未來的農田里,RTK也會有更多產生作用的地方。它將融入作物生長的每一個階段,幫助我們實時獲取農田中任意位置的時間和空間信息,再搭配對應的設備,實現定時、定點、定量的農藥化肥投放,取得最佳的經濟效益和環境效益。除了植保作業外,高精度的實時定位還可以協助農村土地測量、確權和提供其他農田中的無人自動化設備高精度導航與數據服務。
第四:在植保無人機上使用RTK技術存在哪些問題?
1、基站的設置及作業半徑對RTK 的測量精度和作業速度有直接影響。基準站應盡量架設在地勢較高的地方,而且要遠離強電磁干擾源和大面積的信號反射物。
2、RTK技術的本身,是依賴于GPS衛星定位的,它的使用要有四顆以上衛星相位觀測值的跟蹤和必要的幾何圖形,如果所在地本身接受GPS的信號就很差,那RTK也沒有什么作用。另外在有大面積的信號反射物的地方是無法定位的,如高層建筑附近,茂密的森林等;強電磁源也會干擾信號,如高壓輸電線附近,變電站等,在云層較厚的時候也有影響。
本文鏈接:http://m.aiquka.com/blog/624.html
本文標簽:無人機
上一篇:無人機飛控技術詳細解讀
下一篇:航空攝影的質量控制











