

傳統的三維建模和低空攝影測量技術已經遠遠不能滿足當下快速精細建模的要求。傳統三維建模主要依靠二維的平面矢量圖、正射影像圖等數據為底圖建立白膜,通過將高程數據和拍攝的紋理數據貼在白膜上來構建。由于傳統的建模方法效率低,勞動強度大、生產成本高等缺點,將逐漸被淘汰。傳統低空攝影測量技術,廣泛應用在大面積區域調查、安全監測、災害應急、環境保護等諸多領域。通過無人機搭載傳感器,快速、高效、便捷地獲取高分辨率影像數據,從而制作DOM( 數字正射影像) 和DEM( 數字高程模型) 。但是由于傳感器和數據處理算法等軟硬件的限制,并不能快速高效地還原最真實的三維場景。
無人機攝影測量具有靈活快速、高效便捷、成本較低、影像分辨率高等特點大大促進了傾斜攝影測量技術的發展。傾斜攝影測量徹底改變了人工建模的弊端,通過自動化的數據處理手段大大加快了大場景精細三維模型的生成速度。傾斜攝影測量技術也顛覆了傳統低空攝影測量只能從垂直角度獲取數據的局限,在無人機上同時搭載多個傳感器,從多個角度獲取影像數據,能夠更加真實全面立體反映地表物體的局部細節和整體層次。利用傾斜攝影測量技術獲取豐富的紋理信息數據,生成密集三維點云和TIN 格網模型,結合自動化實景建模模型,實現三維場景的快速、高效、低成本的真實還原。
2 數據獲取的主要流程
傾斜攝影測量主要有地面飛控系統、無人機、控制測量三個部分組成。飛控部分主要規劃設計無人機的飛行航線、航高、以及對無人機飛行監視控制和數據通信等,無人機部分主要由機載定位系統和多視相機組成,控制測量主要是航測區域的控制網設計和像控點的測量。無人機航拍前需要對測區進行現場踏勘,首先根據已有GPS 控制點位去合理布設像控點,像控點的數量和位置依據實際測量規程要求的精度和測區范圍的大小均勻布設。其次根據申請的空域時間和范圍合理規劃飛行航線,保證影像的航向重疊、旁向重疊、分辨率等符合作業要求。在航線的設計中,一般設置30%的旁向重疊度,66%的航向重疊度。對于模型的自動生成,旁向重疊和航向重疊會要求更高[1]。再次要在已知的高精度點位上架設基站,在無人機起飛規定時間前開機,降落后在規定時間內關機。在測量時,需要量取天線高,記錄基站開關機的具體時間,并進行像控點的測量。最后組裝無人機和設置相機參數,實施無人機航拍,飛行結束后,分別下載無人機數據和基站數據。
在影像數據的獲取過程中,會受到相機鏡頭畸變在內的儀器本身以及天氣變化在內的外界自然影響而產生的不可避免的誤差。如果不對原始影像進行預處理,會直接影響到后期成果數據的精度和質量。影像數據后續處理基于數字攝影測量、多視影像聯合平差、計算機視覺等相關算法,數據處理過程中無須人工干預,具有高伸縮性和高效性。利用AgisoftPhotoscan、Smart3D capture 等相關軟件,在有無控制點的情況下,都可以實現多視圖多視角的三維重建,還原最真實的三維場景。同時利用相關數據處理軟件實現對三維模
型的高度、面積、長度、體積等實現精準量測。傾斜攝影測量技術獲取多視角的高分辨率影像數據,并實現大場景精細三維場景的最真實還原。數據獲取處理的主要流程,如圖1 所示。
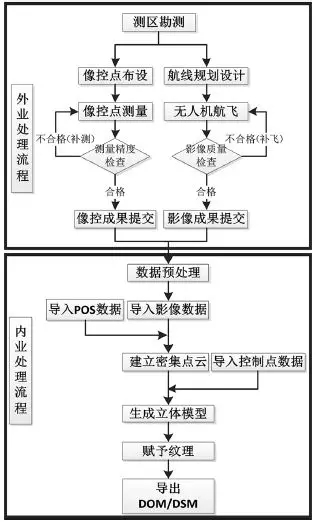
圖1 數據獲取處理技術流程
3 數據處理的關鍵技術
3. 1 多視影像密集匹配和空三解算
由于傾斜攝影測量獲取的影像是范圍廣而且多視角的,各個航帶間的影像視場差別較大,傾斜立體影像間往往存在較大的幾何畸變,增加了影像匹配的難度[2]。多視影像的密集匹配就是尋找連接點構網的過程,同時消除多視影像數據中的冗余信息。影像匹配的算法分三類: 灰度匹配、特征匹配和關系匹配,匹配的共性就是在影像上按照匹配策略需找同名點[3]。基于SIFT 算法為代表的特征匹配,匹配的誤差較多、耗時較長。在傾斜攝影測量中導入處理影像數據,同時添加POS 數據可以輔助多視影像的匹配,依據POS 數據可以粗略得到原始影像的外方位元素,進行相關算法的粗匹配剔除一些誤匹配點,進而再重新精確匹配[4]。空三解算的就是影像間精確幾個拓撲關系重建的過程。根據地面布設的像控點,并以共線方程為基礎,進行光束法區域網平差。
3. 2 多節點并行計算的實現
并行計算是將計算任務分解成多個并行的子任務,分配到具有并行處理的計算節點上,通過各節點上的處理器相互協同,共同解算并行子任務,從而使得計算加速。并行計算系統主要有并行機,并行算法和并行編程三個重要組成部分,如圖2 所示。并行計算的基礎是并行機,并行機的核心組成是處理器、內存和互聯網絡。通過互聯網絡將并行機串聯起來,在并行機上實現影像數據的同步、共享和訪問。針對特定應用類型進行互聯網絡拓撲設計,可以極大提升并行計算能力和效率。并行算法的主要設計分為任務分解、通信設計、任務聚合和處理器映射四個步驟,根據并行算法通過并行編程環境編制為程序并運行得到計算結果[5]。
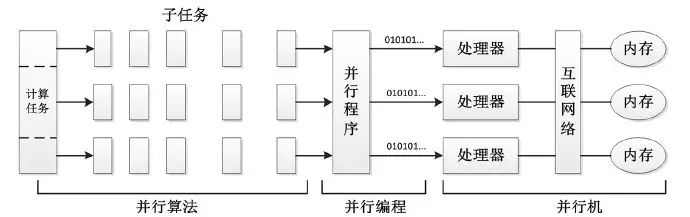
圖2 并行計算結構圖
影像數據的密集匹配和空三解算可以在任何一臺并行機上實現,在模型重建過程中,將模型劃分為若干個大小長度相等的規則瓦塊。依據并行算法和程序,通過互聯網絡使得串聯的并行機同時對劃分好的規則瓦塊進行并行計算。通過并行計算的實施,極大地提高三維模型計算和生成的速度,同時降低了三維模型對計算機硬件的配置要求。
3. 3 面向GPU 的LOD 可視化
在傾斜攝影測量的三維模型的可視化需要CPU和GPU 協調合作完成,紋理映射、模型繪制以及場景的渲染主要依靠GPU 的性能和效率。GPU 具有小緩存多核的架構和快速高效的并行計算能力,適應GPU的數據結構必須能夠充分發揮GPU 高速處理和高效渲染的能力,避免計算機硬件數據帶寬沖突問題[6]。傾斜攝影測量生成的模型數據進行分塊分級處理,對于生成的瓦塊數據建立四叉樹或者八叉樹的空間索引模型,從而提高數據的讀取效率,減少數據 I /O 操作,加快數據的調度和繪制。基于四叉樹索引結構的多細節層次模型( LOD) ,如圖3 所示。在三維模型數據生成過程中,通過不同的簡化比例得到三維模型數據的LOD,一般至少有5 層~6 層,多的可達10 層左右[7]。
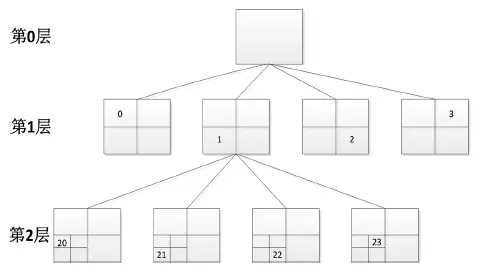
圖3 基于四叉樹的LOD 模型
4 數據質量分析與比較
4. 1 LiDAR 建模的特點分析
三維激光掃描技術具有非接觸、高精度、全天候等諸多優點,廣泛應用在文物保護、安全監測、城市規劃等相關領域。通過對海量的點云數據進行配準、精簡、分割、封裝、補洞等一系列煩瑣的操作構建三角網模型,同時海量點云數據的處理完全依賴計算機硬件配置的高低[8]。彩色模型生成主要是通過將三角網模型進行UV 展開,再將紋理數據一一對應手工映射。這種方法不僅耗時長、效率低、精度不高,同時紋理映射的質量一般,如下圖4 所示。傾斜攝影測量作業范圍更大,影像數據量要比同范圍的點云數據量更小,將影像數據和控制點數據導入后,自動實現多視影像聯合平差、密集匹配和空三解算。數據處理中對計算機硬件要求較低,可以實現并行計算,可以獲取密集點云、三角網模型、彩色模型以及正射影像等諸多成果數據,支持網絡發布等諸多優點。利用三維激光點云建模和傾斜攝影測量建模的比較,如表1 所示。
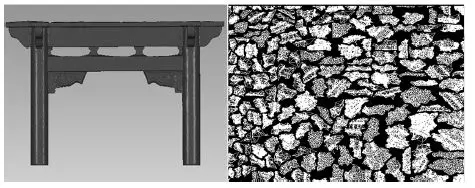
圖4 三角網模型UV 展開
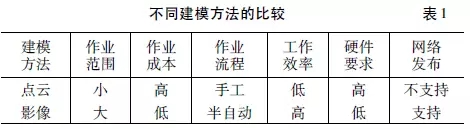
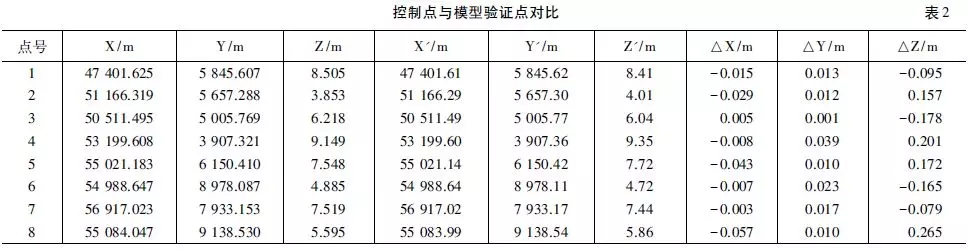
三維激光掃描建模技術由于精度高、成本高等特點,更適應于構建小范圍的精細模型,不適應于大場景三維模型的構建。傾斜攝影測量在大場景三維模型構建中成本低、范圍廣、效率高等優點更加突出,同時精度也能滿足三維模型和大比例尺DOM 制作的精度要求。為了驗證成果數據精度,在航測區域布設了8 個控制點,其中4 個建模控制點,剩余4 個為模型驗證點,如表2 所示。X,Y,Z 為實測的坐標值,X',Y',Z'為對應三維模型的坐標值,△X,△Y,△Z 為殘差值,經過計算中誤差均符合相關模型和制圖的規范要求。在實際的工程項目中,可以根據需求將兩種建模方法相結合。大場景三維模型的快速構建采用傾斜測量技術攝影,小范圍精細模型構建采用三維激光掃描技術,實現多源數據下多層次不同粒度三維模型的融合統一。也可以利用三維激光掃描獲取的高精度點云數據和傾斜攝影測量技術生成的三維模型數據進行分析、對比和校正,從而提高三維模型數據的整體精度。
4. 2 數據質量要求以及評價標準
外業數據的質量要求主要是像控點的精度和影像的質量。像控點的精度直接影響到三維模型數據的幾何精度。像控點的布設間距根據三維模型精度要求與像片比例尺的不同而不同,一般平均0.5 km ~ 20 km,采用E 級GPS 網的作業要求進行像控點聯測就可以達到三維模型對像控點的精度要求。根據GPS 網的布網要求以及起算點和像控點的分布來布設GPS 網,網中應聯測三個以上的公共點。考慮到高程擬合,在網的四周和中心需要聯測一定數量的水準點。影像的質量好壞直接影響到三維模型等成果數據的質量。無人機獲取的影像數據首先基于人為經驗的視覺特征要滿足清晰、無色差、色調一致,同時影像數據的幾何指標、構象指標、其他指標等也要符合規定要求,綜合人為和客觀兩種評價構建影像質量綜合評定模型[9]。
內業數據處理出來的三維模型數據要求各要素應該完整,沒有遺漏,同時沒有冗余,模型包括其組成部分的幾何位置精度要符合規范要求。三維模型各個部分各個要素的分類編碼要正確,屬性項或者屬性值應該完整正確。三維模型數據的存儲格式和空間位置的拓撲關系具有一致性,同時三維模型數據應具有較強的現勢性等[10~12]。通過多個項目實踐,基于傾斜攝影測量生成的大場景多角度三維模型的完整性、位置精度、屬性精度、表現精度、邏輯一致性等均符合數據質量的控制要求。
5 結語
傾斜攝影測量快速生成的三維實景模型在智慧城市、災害應急、國土安全、文物保護等諸多領域中發揮越來越重要的作用,同樣也面臨著較多的挑戰。由于硬件或者拍攝技術等因素,對地面上高度較低且不規則物體的真實還原還不夠好。面對傾斜攝影測量技術快速生成的大場景三維模型,仍需要進一步對模型開發和利用,模型單體化和數據的融合是傾斜攝影測量面臨的亟待解決的問題。目前實現所謂的“單體化”,只是在利用外包圍合將模型特定部分進行高亮顯示而已,并沒有真正意義上實現三維模型各要素的自動分層、分割和提取。實現將矢量的二維數據和三維模型數據相融合以及真正意義上的模型單體化,三維模型數據的分析、查詢、編輯也將成為現實。
本文鏈接:http://m.aiquka.com/blog/626.html
本文標簽:實景三維
上一篇:航空攝影的質量控制
下一篇:1:500航測法高精度成圖的關鍵技術研究及其應用











