

1∶500 地形圖測繪全野外成圖工作量大,工期較長,成本較高。長期以來,為了減少工作量、縮短工期、降低成本,業(yè)內(nèi)一直嘗試采用航測法成圖,并做了大量研究和嘗試,但精度一直不理想。近些年無人機航攝因為使用方便,數(shù)據(jù)獲取成本低、速度快,在1∶1000、1∶2000 等比例尺的地形圖測繪、正射影像圖生產(chǎn)等領(lǐng)域得到廣泛應(yīng)用,但在1∶500 航測法地形圖測繪中,精度仍然不能完全達到規(guī)范要求。
本文通過對1∶500 無人機航測法成圖過程中誤差產(chǎn)生的來源進行分析,研究提高航測法成圖精度的關(guān)鍵技術(shù),選用速度慢、振動小、姿態(tài)好的電動差分無人機作為航攝平臺,通過航線優(yōu)化設(shè)計,建立1∶500無人機航測法高精度成圖技術(shù)路線和工藝流程。
2 1∶500 航測法成圖誤差來源
(1)像片的地面分辨率和影像質(zhì)量
在傳統(tǒng)無人機航測法成圖過程中,像片控制測量誤差、空中三角測量誤差、立體像對定向誤差、立體采集過程中的位置判定誤差等,會在作業(yè)過程中不斷傳遞并積累,影響成圖的最終精度。
不難發(fā)現(xiàn),所有環(huán)節(jié)誤差的產(chǎn)生都與像片的分辨率和影像質(zhì)量有關(guān)。分辨率越高、影像質(zhì)量越好,判讀就越準確,誤差也就越小,所以要提高成圖精度必須首先提高像片的地面分辨率和影像質(zhì)量。
(2)鏡頭畸變
無人機航攝采用的相機一般為非量測型全畫幅相機,鏡頭畸變大,尤其是邊緣部分。盡管可以根據(jù)相機畸變參數(shù)對像片進行畸變糾正,但糾正過程中會
產(chǎn)生糾正誤差,且越往邊緣,糾正誤差越大。所以為了提高精度,應(yīng)加大像片重疊度,盡可能使用像片中心部分的影像。
(3)像片外方位元素
一般的無人機沒有配置高精度慣導(dǎo)裝置,僅采用普通GPS 進行定位導(dǎo)航,所以在相機曝光同時記錄的位置數(shù)據(jù)誤差很大,需要后期完成大量的像片控制測量后,才能進行空中三角測量。為了減少像片控制測量工作量及后繼工序的誤差累積,應(yīng)盡可能提高曝光瞬間像片的外方位元素精度。
3 高精度成圖關(guān)鍵技術(shù)
根據(jù)誤差來源分析,要提高成圖精度,有必要采用一些關(guān)鍵技術(shù)手段和方法,以增強影像質(zhì)量、提高影像地面分辨率、減小鏡頭畸變影響、提高像片外方位元素精度。
(1)事后差分GPS
事后差分GPS 系統(tǒng)包括基站GPS、移動站GPS 和事后差分解算軟件。基站GPS 架設(shè)在已經(jīng)測定精確位置的點位上進行長時間連續(xù)觀測。移動站GPS 搭載在無人機上,其天線中心位置與相機中心位置經(jīng)過量測標定。移動站在飛行過程中連續(xù)觀測,并完整記錄相機曝光瞬間給出的曝光時間戳信號。航攝完成后,事后差分解算軟件根據(jù)基站精確位置數(shù)據(jù)、基站連續(xù)觀測數(shù)據(jù)、移動站連續(xù)觀測及曝光時間戳數(shù)據(jù)進行事后差分解算,獲得每張像片的高精度位置坐標數(shù)據(jù)。
(2)相機曝光與移動站GPS 記錄時間戳高度同步相機曝光的真實時間與移動站GPS 記錄的時間戳總會有些誤差,需要采用一定的技術(shù)手段最大限度減小這個差值,盡可能實現(xiàn)相機曝光時間與移動站GPS 記錄的曝光時間戳同步。
(3)增強像片影像質(zhì)量
像片影像質(zhì)量直接影響影像判讀準確度,對1∶500 測圖尤為重要。所以需要選用成像質(zhì)量較好的相機,選擇空氣潔凈、光照充足的時間段,優(yōu)化相機參數(shù)后進行航攝,以獲得影像質(zhì)量較好的像片。
(4)適度提高影像地面分辨率
影像分辨率越高,在航測法成圖的各個環(huán)節(jié)中對影像的判讀精度就會越高,但是航攝效率會下降。根據(jù)《數(shù)字航空攝影規(guī)范 第一部分:框幅式數(shù)字航空攝影》,1∶500 航測法成圖要求航攝地面分辨率小于0.08m,在兼顧航攝效率的同時為了提高成圖精度,根據(jù)經(jīng)驗確定地面分辨率為0.04~0.05m。
(5)減小像點位移
像點位移會降低影像解析能力,影響判讀精度。規(guī)范規(guī)定像點位移一般不應(yīng)大于1 個像素,最大不應(yīng)大于1.5 個像素。由像點位移公式δ=v×t/GSD 可知,要減小像點位移就要降低飛行速度,縮短曝光時間。所以需要在確保影像質(zhì)量的情況下將曝光時間縮到最短。根據(jù)經(jīng)驗,像點位移小于1/3 個像素時可保證影像解析能力。
(6)提高像片重疊度
提高像片航向重疊度和旁向重疊度,有利于減少對像片邊緣影像的利用,最大限度降低像片畸變糾正過程中的影像糾正誤差。規(guī)范規(guī)定航攝重疊度一般應(yīng)為航向60%~65%,旁向20%~30%。為了提高成圖精度,可加大重疊度。根據(jù)經(jīng)驗,航向重疊度取70%~75%,旁向重疊取60%~65%可顯著提高空中三角測量平差精度。
(7)增加構(gòu)架航線
構(gòu)架航線與正常航線垂直布設(shè),起高程控制點作用,有利于減少像片控制點量測數(shù)量,增強區(qū)域網(wǎng)模型之間連續(xù)性,提高空中三角測量平差精度。構(gòu)架航線結(jié)合事后差分解算提供的像片高精度POS 數(shù)據(jù),能夠?qū)崿F(xiàn)稀少像片控制點甚至無像片控制點完成空中三角測量。
4 1∶500 無人機航測法高精度成圖試驗
4.1 試驗流程及飛行區(qū)域選擇
本試驗過程包括飛行區(qū)域選擇、航攝設(shè)計及相機檢校、航攝作業(yè)、事后差分解算、空中三角測量、檢查點立體量測、檢查點野外量測、精度評定等步驟,具體試驗流程如圖1。
選擇的試驗區(qū)域位于四川省簡陽市,面積約3km2,整體地形為丘陵,高差約80m。區(qū)域內(nèi)有居民地、廠房、道路、平整地塊、水系、植被等地物,對于本次試驗具有典型的代表意義。
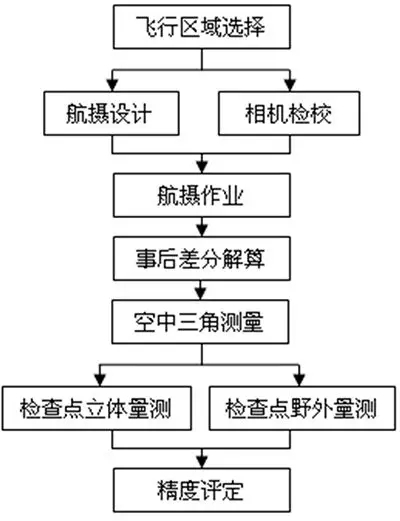
圖1 試驗流程
4.2 航攝設(shè)計及相機檢校
(1)航攝飛行平臺的選擇
航攝飛行平臺應(yīng)裝備高精度差分GPS 系統(tǒng),實現(xiàn)相機曝光時間戳的精確記錄;采用電力驅(qū)動,實現(xiàn)慢速、穩(wěn)定飛行。CW-10 電動復(fù)合翼垂直起降無人機自帶高精度差分GPS、引閃器,采用大容量鋰電驅(qū)動,飛行振動小,巡航速度20m/s,在曝光時間不長于1/1600s 時,可以保證像點位移在1/3 像素以內(nèi),是本試驗較為理想的飛行平臺。
(2)相機選擇及參數(shù)標定
相機選用3600 萬像素全畫幅Sony ILCE-7R 機身,像元尺寸4.88u,搭配成像質(zhì)量較好的蔡司35mm 定焦鏡頭。相機的內(nèi)方位元素和畸變參數(shù)經(jīng)精確標定。
(3)航線規(guī)劃
設(shè)計地面分辨率為0.04m,航向重疊度70%,旁向重疊度60%,構(gòu)架航線垂直于主航線,位于測區(qū)內(nèi)離主航線兩端頭4 條基線長度的位置,航高比主航線高50m。規(guī)劃航線如圖2,東西方向為主航線,南北方向為構(gòu)架航線。

圖2 規(guī)劃航線
4.3 無人機航攝作業(yè)
選擇合適天氣,測定基站GPS 坐標,完成無人機航攝作業(yè),完整下載航攝像片數(shù)據(jù)、基站GPS 數(shù)據(jù)、移動站GPS 數(shù)據(jù),并檢查數(shù)據(jù)完整性及可用性。
4.4 事后差分解算及空中三角測量
(1)事后差分解算
利用事后差分解算軟件對基站坐標數(shù)據(jù)、基站GPS 數(shù)據(jù)、移動站GPS 數(shù)據(jù)、機載POS 數(shù)據(jù)進行聯(lián)合解算,得出精確的影像POS 數(shù)據(jù),平面坐標系為CGCS2000,高程系為橢球高,也可以加上高程異常,使用正常高。
(2)空中三角測量
選擇GodWork 軟件作為空中三角測量工具。整個空三過程包括:原始數(shù)據(jù)載入、自動相對定向、自動絕對定向、平差和輸出結(jié)果。這個過程只需要少量的人工干預(yù)。
4.5 精度檢測
(1)檢查點立體量測
將空三結(jié)果導(dǎo)入到全數(shù)字攝影測量系統(tǒng),在立體上量測檢查點三維坐標。
(2)檢查點野外量測
采用天寶RTK 到野外實地測量檢查點三維坐標。
(3)精度對比
以檢查點野外量測為基準,立體量測相對野外量測的平面位置中誤差、高程中誤差分別按下面公式計算。
式中:
m1——檢查點中誤差,單位為米(m);
Δ——檢查點野外實測值與立體觀測值的誤差,單位為米(m);
n ——參與評定精度的檢查點數(shù)(每幅圖20~50個)。
隨機抽出兩幅圖進行精度檢測。每幅圖檢查點個數(shù)為33 個,總計66 個,并均勻分布。檢查點統(tǒng)計計算結(jié)果見表1。平面位置中誤差為0.071m,最大誤差為0.158m;高程中誤差為0.069m,最大誤差為0.129m。小于2 倍中誤差的檢查點有10 個,小于1 倍中誤差的檢查點有56 個。
表2、表3 分別為GB/T 23236-2009 《數(shù)字航空攝影測量空中三角測量規(guī)范》、GB/T 14912-2005《1∶500 1∶1000 1∶2000 外業(yè)數(shù)字測圖技術(shù)規(guī)程》關(guān)于1:500 比例尺的精度要求。對比表1 和表2、表3,試驗實現(xiàn)了1∶500 無人機航測法高精度成圖的試驗?zāi)繕恕?/p>
表1 檢查點誤差統(tǒng)計表

5 1∶500 無人機航測法高精度成圖的工程應(yīng)用
經(jīng)試驗驗證后,利用本技術(shù)方案實際應(yīng)用于廣安市溪口鎮(zhèn)1∶500 地形圖測繪。測區(qū)位于山谷地帶,面積2km2,中央地形較平,為丘陵地形,四周屬于山地地形,利用本技術(shù)方案完成了航飛、POS 解算、空中三角測量、內(nèi)業(yè)立體測圖。精度檢測時隨機抽取4幅圖進行精度檢測,檢查點共84 個。經(jīng)統(tǒng)計,平面中誤差±0.09m,高程中誤差±0.08m,平面及高程精度均滿足相關(guān)規(guī)范要求。
6 結(jié)束語
在當前差分GPS 技術(shù)、無人機技術(shù)、相機技術(shù)不斷進步的過程中,通過科學(xué)的優(yōu)化技術(shù)路線,1∶500無人機航測法高精度成圖試驗成功并在實際工程中得到應(yīng)用,完成了業(yè)內(nèi)追求多年的夙愿,順利實現(xiàn)1∶500 地形圖測繪工期縮短、成本降低的目標。雖然因植被覆蓋無法看見的地物測量、房檐改正等工作,仍需要野外實地測量,航測法成圖不能完全代替野外作業(yè),但這并不能影響1∶500 無人機航測法高精度成圖在實際工程應(yīng)用中的重要現(xiàn)實意義。











